RugRat1 Robot
David P. Anderson
RugRat1 Mpeg
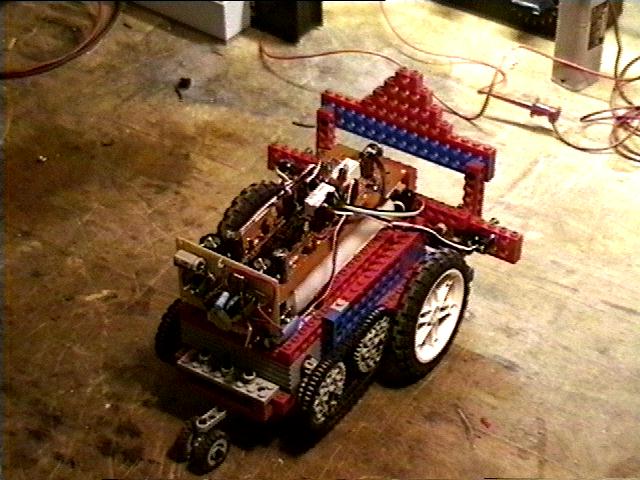
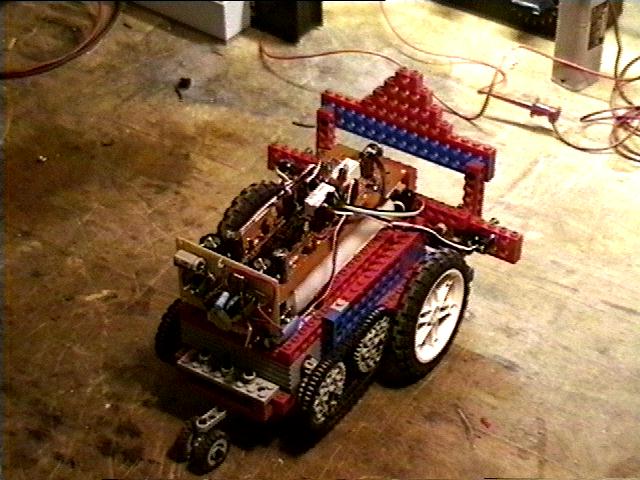
My first robot, circa 1993, built with my sons Jonathan and Stephen from a Lego Technics set.
What a wonderful science and engineering learning tool! It used two lego motors and a
gear and chain drive system with a
pivoting tail wheel.
We got tired of chasing it around up and down the living room while it ran into the walls and
furniture so we built an all-analog logic control board using transistors and relays to implement
a bump-and-run navigation algorithm, triggered by
micro-switches in the front bumper. as suggested by the "Mobile Robots" book from Jones and Flynn.
A bumper press caused the robot wheels to reverse for a
short period while a capacitor discharged, one wheel longer than the other, depending on the side,
as adjusted by a pair of potentiometers. While both sides are reversed, the robot backs away from
the obstacle. When only one is reversed, it pivots left or right, and when neither are reversed,
it moves forward again. This all happens pretty fast, as the movie demonstrates. We had only
one speed: full!
The mpeg movie
shows our improved "Rev B" electronics which included a "corner logic"
add-on board that triggered a 180 degree turn if too many bumps were happening too quickly,
(to keep from getting stuck in corners), again as timed with a discharging capacitor. This version
of the control board also included our own "Patience/Tolerance" adjustment knobs to determine if
the robot was not getting enough bumper presses, like when stuck or traveling for a long time in
a straight line. When the Patience level fell below the Tolerance level, the robot abruptly
changed directions (just like the kids!)
The down side of all beloved Lego creations is that they must be dismantled to produce the next version.
Pieces of this robot (and it's behaviors) can be seen in our present-day contest LegoBot.
Back to my Robots homepage.