Two-wheel balance on an incline.
I think that a good case can be made that two wheel balance does have
some practical advantages, as well as serving the end as a learning
experience of an intermediate step towards bi-pedal walking robots.
The other robots I've built, and most of the ones in the DPRG and SRS
that I have seen, are three wheel robots, with two drive wheels in a
differential steering arrangement, and a castering tailwheel. There are
some variations on this, but this seems to be the most common design. I
have four robots in one form or another that all follow this design.
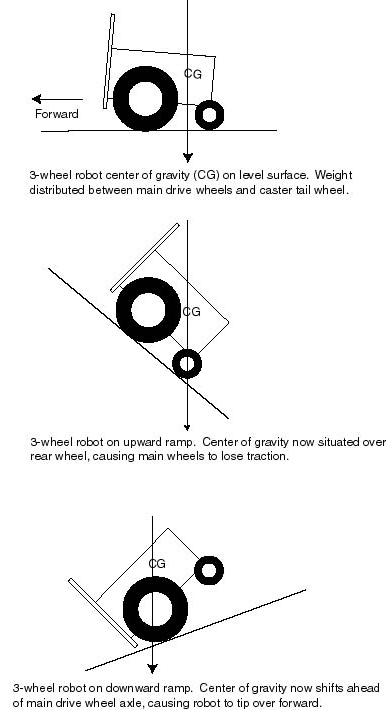
The three wheel design gets its stability by dividing the platform weight
between the main drive wheels and the tail wheel or skid or whatever. Too
much weight on the drive wheels and the platform is not stable, easily
tipping over. Too much weight on the tail and the main wheels lose traction.
As detailed in this
drawing, this works fine on a flat surface, but when going up and down inclined
surfaces it doesn't work as well. When going uphill, the weight
shifts back over the tail wheel causing the drive wheels to lose traction
and slip, and, as the hill gets steeper, eventually it stops forward
motion altogether and just spins the wheels, as illustrated in the second
drawing.
When going downhill it is perhaps worse, as the C/G shifts forward and
eventually causes the robot to tip up on its nose as the hill gets
steeper. Most of these robots can climb steeper slopes than they can
come down, tipping forward on the nose when the downhill slope is
only 15 or 20 degrees, as shown in the third drawing. A four wheel
base, like an R/C car, does not have this problem, but gives up the
simplicity and trivial odometry of the differential drive design.
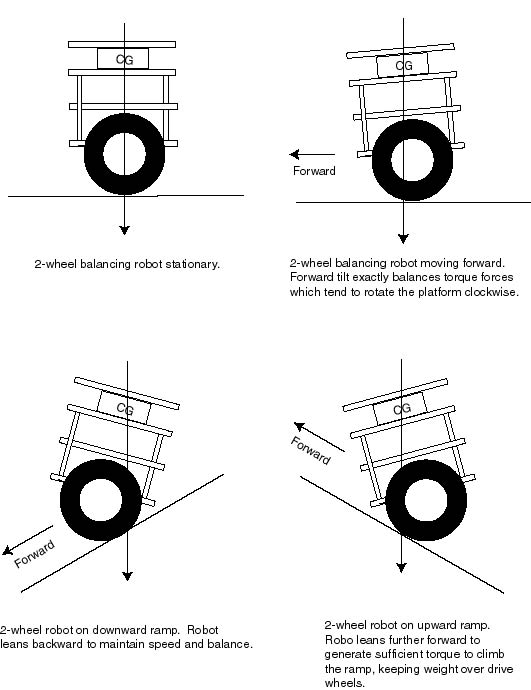
But the balancing robot behaves very differently on inclines. As it climbs
a steep slope, it automatically leans forward and so keeps the platform
weight over the main drive wheels. Likewise, on a downward slope it
leans backwards and keeps the center of gravity over the drive wheels,
as illustrated in this drawing.
So for un-even surfaces and outdoor applications I believe the two-wheel
balancing platform has significant practical advantages in terms of
stability over the more conventional 3-wheel platforms.
Back to
my robots page.