The first two challenges are intended to be run on a large obstacle-free parking lot. Here is a picture of the preferred location for this Springs 2008 contest, next to the Railroad Museum:

Railroad Museum Parking Lot
The GPS coordinates below given in decimal degrees are the four corners of a clockwise square in the RailRoad Museum parking lot pictured above:
100x100 foot square (+- 0.5 feet) 1. N 32.78228 2. N 32.78219 W 096.76082 W 096.76051 3. N 32.78193 4. N 32.78202 W 096.76062 W 096.76093Here are the azimuth's and distances for a clockwise pattern around the square, starting at point #1.
From point 1 to point 2: 109.05 deg 30.64 meters 100.52 feet 1206 inches From point 2 to point 3: 199.58 deg 30.66 meters 100.60 feet 1207 inches From point 3 to point 4: 289.05 deg 30.64 meters 100.52 feet 1206 inches From point 4 to point 1: 19.58 deg 30.66 meters 100.60 feet 1207 inchesThe Borenstein UMBMark calibration benchmark, which the second contest is based on, requires that a robot drive around a square both clockwise and counter-clockwise. For the contest, each robot will drive only one square at the instruction of the judges.
B. Challenge #1 and #2 backup location
The backup location is in a remote parking area if the RailRoad Museum parking lot is not available. Here is a picture of that parking lot:

Remote Area Parking Lot
Here are the GPS coordinates for a 100 foot square in that lot:
Fairpark Remote parking lot.
100x100 foot square (+- 0.5)
1. N 32.78112 2. N 32.78084
W 096.74390 W 096.74390
3. N 32.78084 4. N 32.78112
W 096.74357 W 096.74357
Azimuths counter-clockwise: 180,90,0,270
Azimuths clockwise:90,180,270,0
C. Challenge #3 Locations
Drive exercise #1, out and back, but with obstacles in the way. Good obstacles might be a small grove of trees between the waypoints, or the corner of a building or a group of humans in between the waypoints, at the discretion of the judge.
Example obstacles for Challenge #3:
A small grove of trees between two waypoints:
B
|
|
tree tree
tree tree
tree tree
tree
tree tree tree
tree tree
|
|
A
Or the corner of a building used as test obstacle between two waypoints:
B
| /
| /
| /
|/
Building |
|
|
-----------------
/
/
/
/
A
Or humans as obstacles:
B
|
|
human human
human human
human human
human
human human human
human human
|
|
A
D. Challenge #4 Locations
Challenge #4 is an "extreme" version of Exercise #3, but in this case the obstacles are Fair Park itself, its buildings, fences, stairways, sidewalks, and miscellaneous gardens. An example challenge is pictured here:
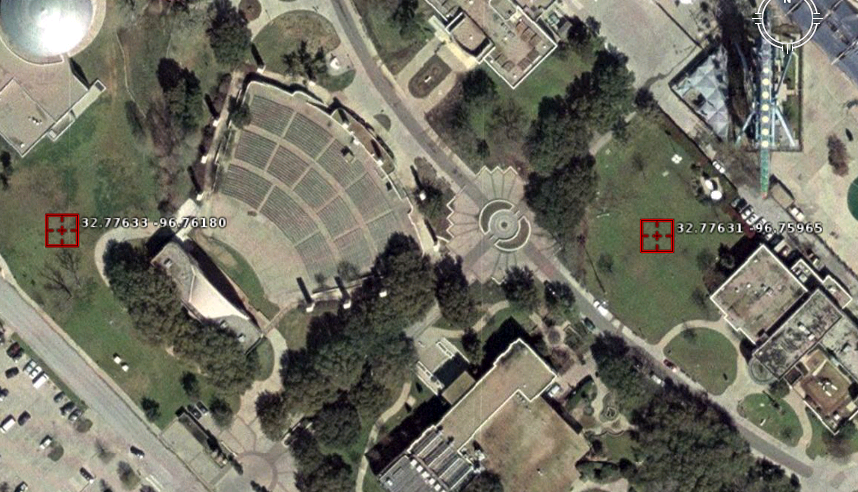
Fair Park Long Haul Challenge
The challenge in this example is to navigate autonomously from the meadow next to the Science Place (waypoint on the left) to the meadow next to WRR (waypoint on the right) and back, with only these two waypoints:
1. N 32.77633
W 096.76180
2. N 32.77631
W 096.75965