CameraCar
Remotely Piloted Vehicle
David P. Anderson

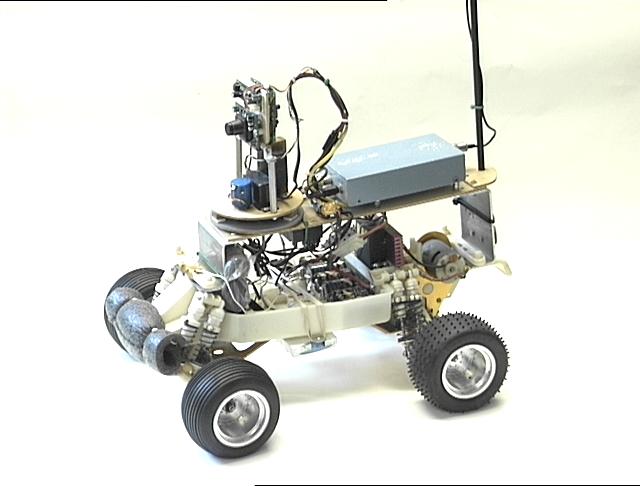
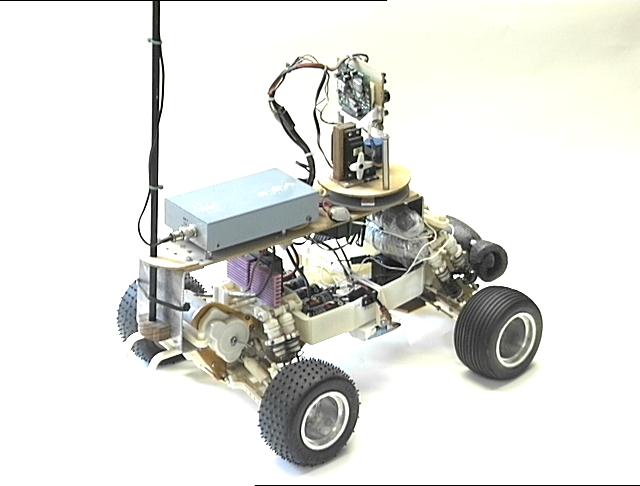
The CameraCar is an R/C car chassis with a TV camera and transmitter, which
is driven remotely by a human operator. The car began its life as a
Traxxas "SledgeHammer" with the truck body removed. We added an aluminum and
plywood superstructure and purchased a camera and TV transmitter from
Super Circuits in Austin, Tx.
We use an
Airtronics 4-channel transmitter and receiver to both control the car and the camera platform.
The TV transmitter operates at low power on the "unused" channel 14. In operation the driver sits
in front of a television set and drives the car with a standard R/C 4-channel transmitter. The right
stick controls the motor and steering, and the left stick controls the camera rotation and tilt. A 10-cell
NiCad pack was added under the body to provide the 12 volts for the camera and transmitter and help lower
the center of gravity for increased stability. A friend "slammed" the car with some small high-torque
wheels and tires. My father helped design the ground plane antennas for the transmitter and receiver
from data in the handbook of the Amateur Radio Relay League.
Our original design had a fixed camera pointing forward and slightly down and this proved sufficient
to race around our indoor "racetrack" starting in the kitchen, the straightaway down the hall, around
through the living room, past the piano, around the island in the kitchen and back to the start; a
large figure eight. Five laps around the house constituted a heat, and the best time wins. Mike Hamilton,
a veteran R/C car racer, set the standard with 15 second laps, which we all have taken turns trying to beat!
My wife would occasionally object while working in the kitchen when a driver might from time to
time lose control and slam into the stove, refrigerator, or her feet. (Best not to race at meal time.)
Here is an mpeg movie (4.1 Meg) of my world record attempt: 1 min 11 secs.
I only hit the wall once, in the fourth lap, and the car happened to bounce around in the correct direction to keep going.
The 3rd lap is the best time. After the collision on the fourth lap I became, in Mike's words,
"way too conservative," (but I think he was just trying to rattle my concentration, which worked.)
It's a silent movie, we had no audio at the time, so you don't get the excitement of the whine of the
motor. But the camera shakes around a bit, and it's so close to the floor that the illusion of speed
is quite exhilarating.
As the car swings through the living room you can catch a glimpse of the driver on the
couch with the R/C transmitter sitting across from the TV set we were using to remotely pilot the car.
We found that it's really hard to drive if you look at the car as it comes through the room. Left and
right get confused. Best to just navigate by watching the TV screen.

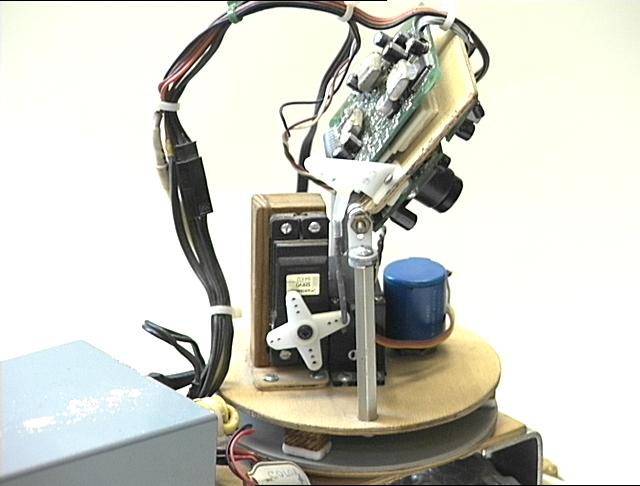
When we started driving it outdoors, up to a range of about one block, we discovered that we needed
to be able to "look both ways before crossing the street." So we constructed the 2-axis camera mount
shown in the picture above. The camera can tilt up and down about 110 degrees and rotate a little
more the 360 degrees, as described in
this article. This turned out to
be also
useful in communicating to the local humans, as the robot can appear to nod its head for "yes" and
shake it back and forth for "no."

Driving the car around the Heroy Science Building at SMU one day about 2:00 in the morning I
discovered that I could push the trashcans around in the halls while the custodians weren't
watching. This led inevitably to some mischief. Here is an mpeg (11 Mg)
of the car worrying an ashcan free from the wall and pushing it down the stairs, and running away
like a naughty child. Here is a shorter version (3 Mb) of just
the coup de gras. The video is pretty crude, just a camera pointed at the TV set, a black and white
set at that. The camera itself is color, which is not apparent in these videos. The end of the longer
video, in which the CameraCar runs away down a long hallway and into the National Data Center, shows
me sitting in a chair operating the vehicle with a big grin.
Happy Roboting.
06 August 2002
Denton, Texas
dpa
Back to my Robots homepage.