The RCAT Robot
by
David P. Anderson


(click images on this page for larger pictures)
Update: 18 October 2018:
Rcat Odometery Calibration Technique
Update: 04 July 2014:
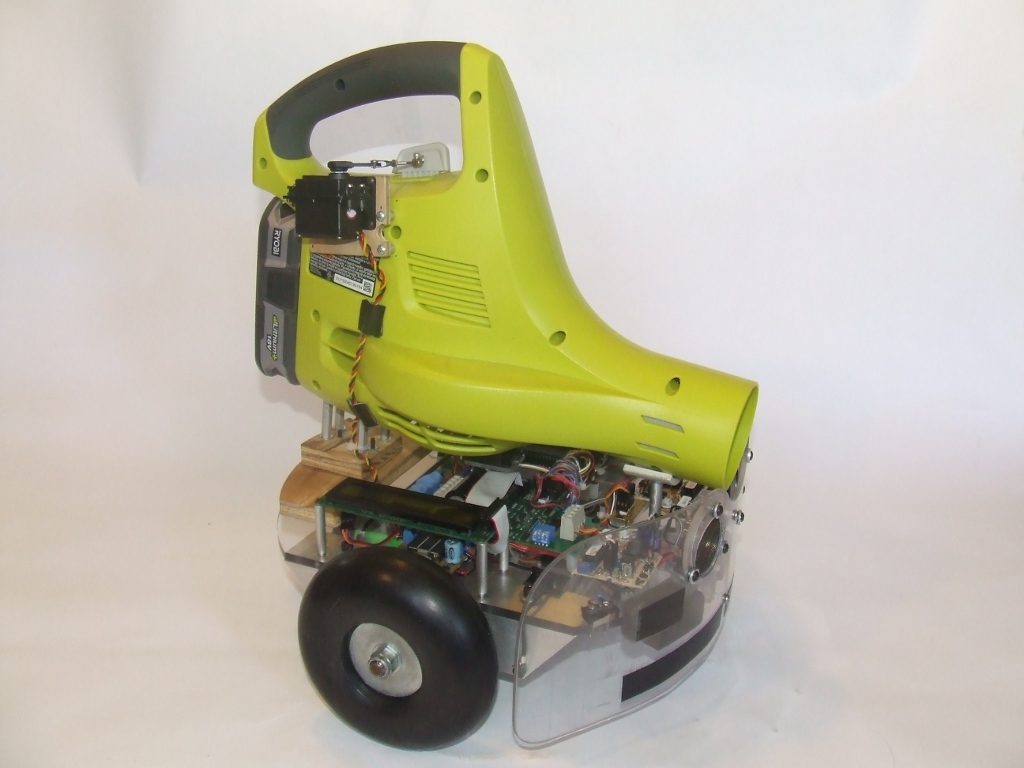
Collecting Empty Soda Cans: A Leaf Blower Attachment for Rcat
For the 2014 DPRG CanCan Soccer Competition, I mounted a Ryobi battery powered electric leaf-blower on RCAT and fitted a servo to the blower's thumb switch, in order to
blow empty soda cans into a soccer goal (video by Steve Edwards).
RCAT took 2nd place in the competiton. (only because it forfeited in the last round to it's older brother, SR04, to much booing from the spectators and other competitors!).

Video:
RCAT at the DPRG CanCan Contest (video).
Update: 01 July 2014:
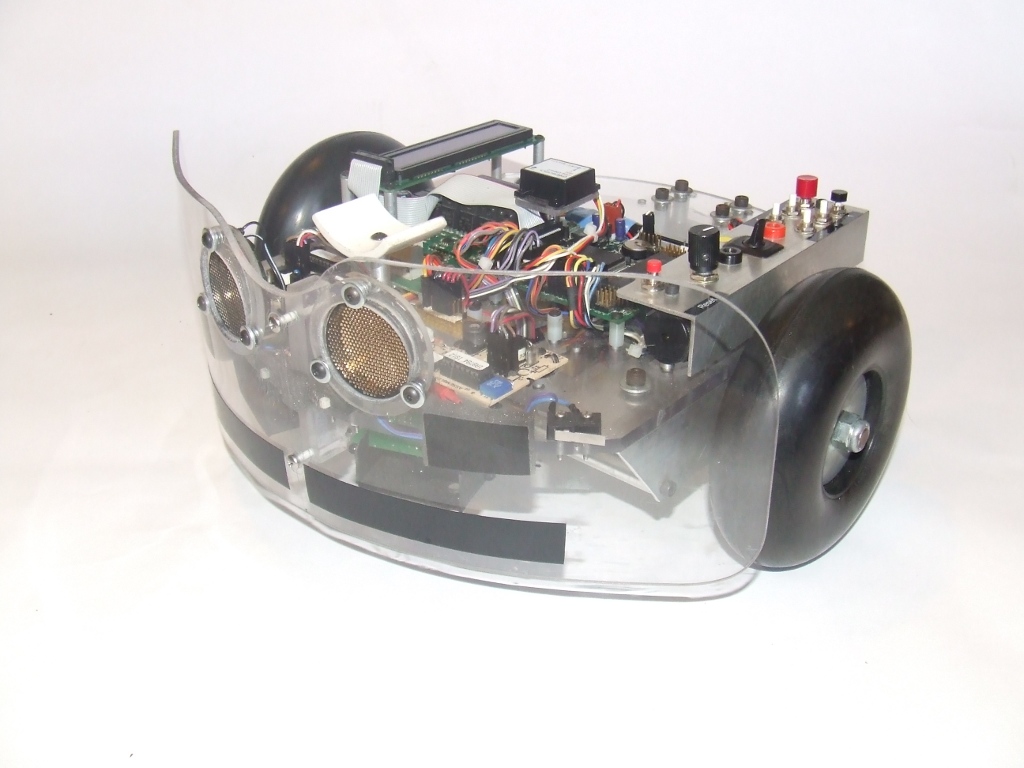
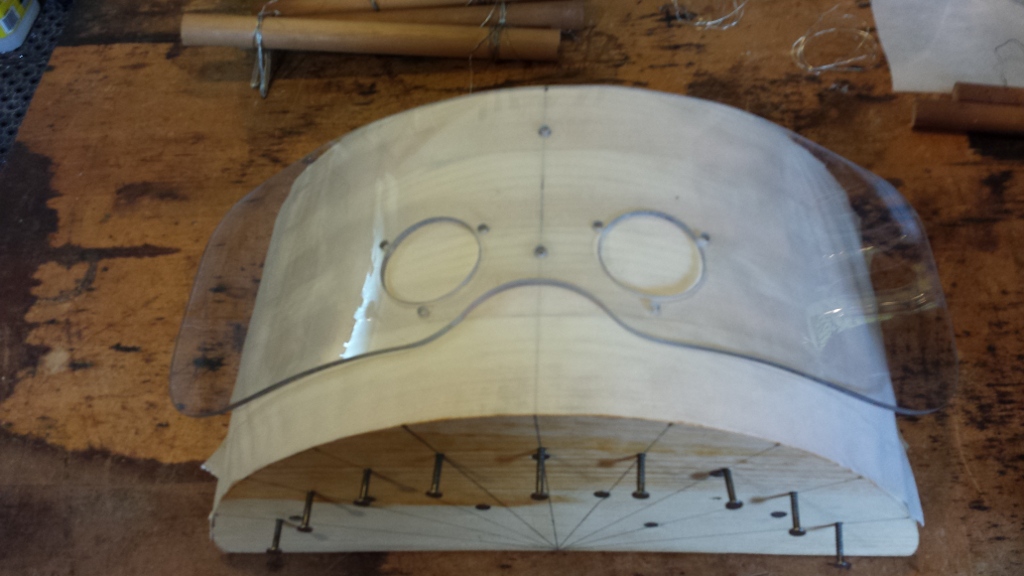
A New Polycarbonate Bumper for RCAT
The original Plexiglass front bumper and sensor array has been replaced by a much more substantial bumper made of polycarbonate (Lexan).
Here's how it was made.

Update: 10 July 2014:
SWITCH DEBOUNCING FOR RCAT
RCAT has a number of micro-switches on the bumper, and also on the control panel. While building these I came across an excellent online article about debouncing hardware switches in software:
www.ganssle.com/debouncing.htm
That article served as the template for the debounce code that I implemented for RCAT. Here's some
example code for RCAT's implementation.
Dave Haylands has written a more generalized version
based on Craig LImber's article
avrbuttons
that works for any number of user defined switches, consisting of
switch.h
and
switch.c.
##########
End of Updates.
##########
08 June 2014:
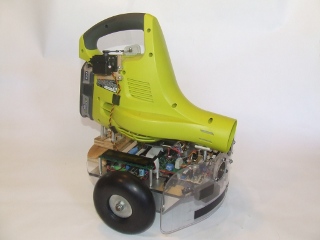
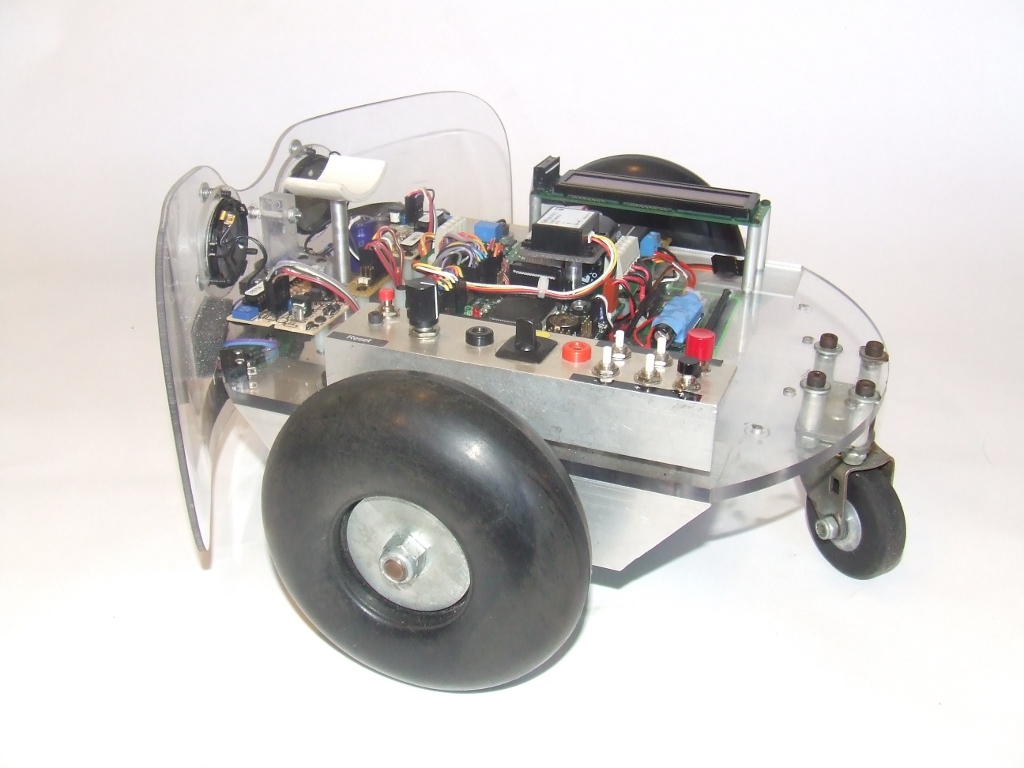
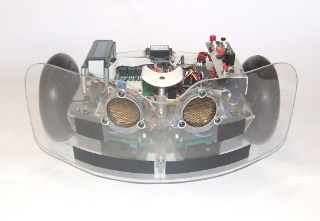
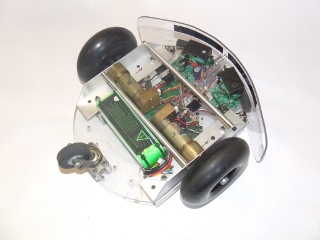
The RCAT Robot
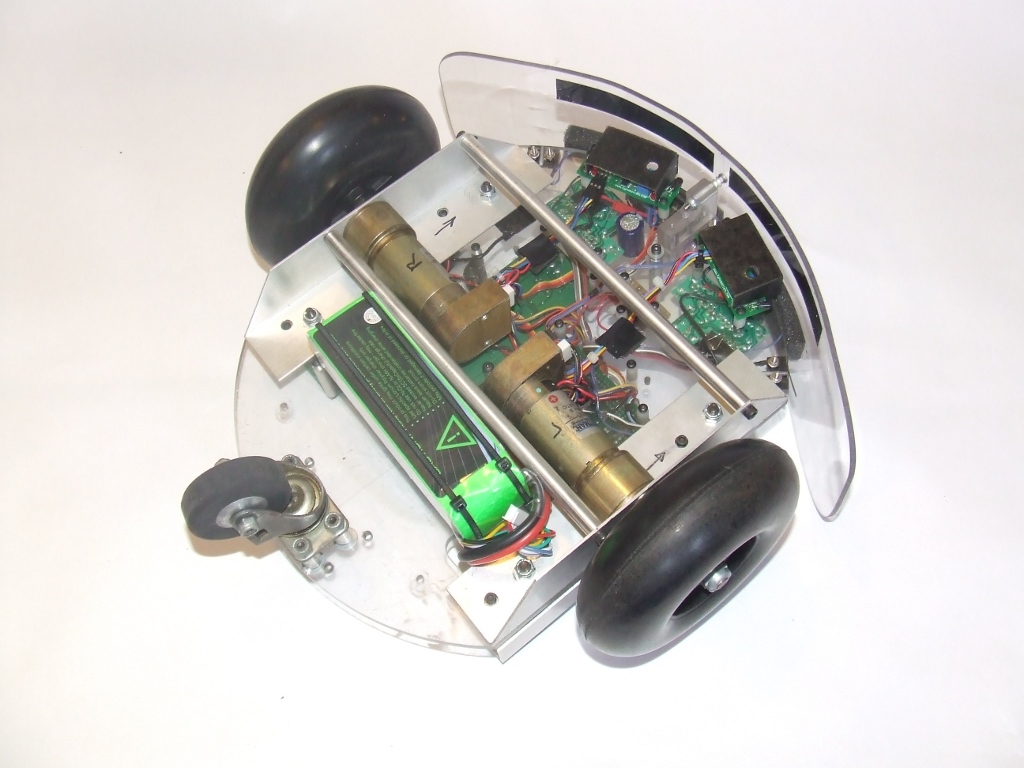
I've been working on a new three wheeled indoor robot with differential drive and a castering tail wheel, called RCAT.
It is constructed of Aluminium and Lexan (polycarbonate) with quarter-scale R/C solid rubber airplane wheels running on custom machined wheel hubs.
The wheels are directly mounted to a pair of ball bearing 24 volt Pittman motors with 38:1 gearheads and built-in shaft encoders.
Power is provided by a 6S 24 volt LIPO pack (I know, I said never again!) and a 10 amp 5 volt
DC-DC converter for the electronics and sensor power.
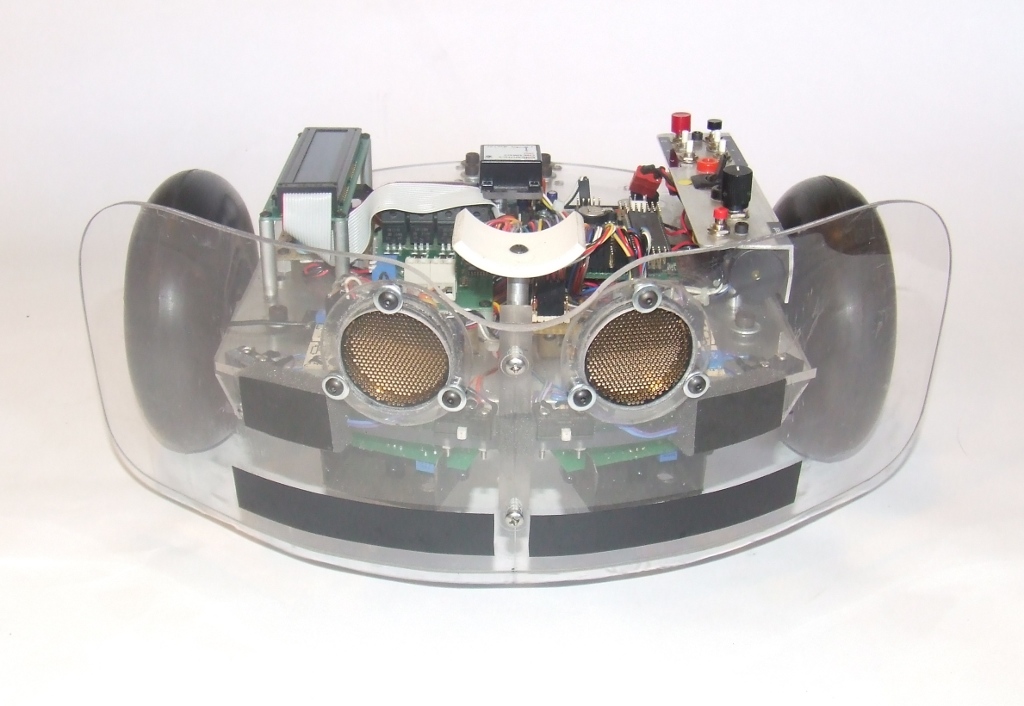
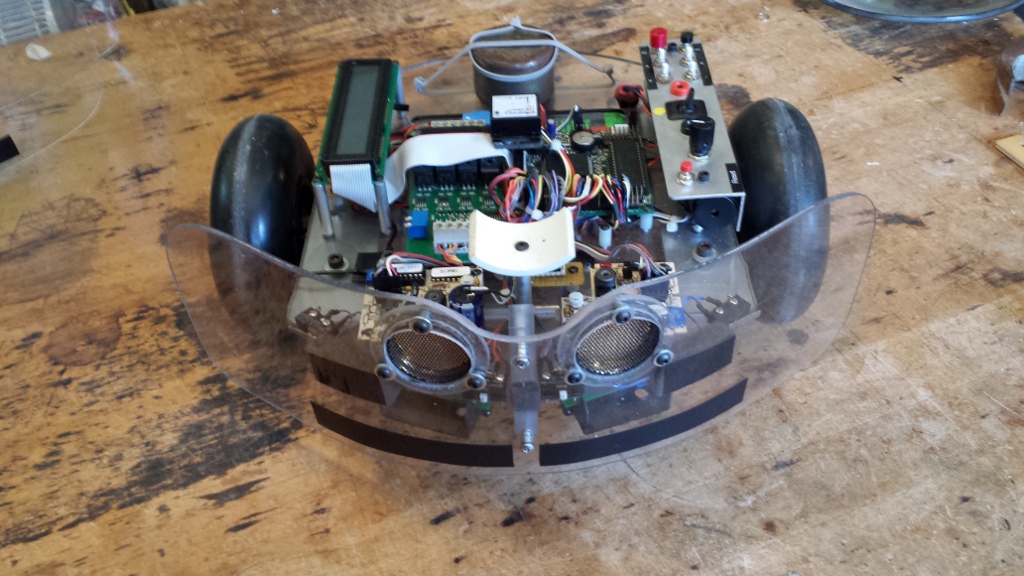
Sensors include encoders for odometery and navigation, an active bumper for collision detection
and recovery behaviors, stereo IR object detections and avoidance, stereo SONAR navigation and avoidance sensors, and a
9 axis IMU (Inertial Measurement Unit) for navigation and stasis detection.
The brain is a
Mini RoboMinds board with an MC68332 processor and 16 channel timer-counter-unit co-processor, 512k of RAM and 512k of flash.
Control I/O is a custom button-and-knob array and a 24x2 LCD display.


Here's a video of
RCAT on the Prowl
in my garage shop. The main control sensors are the stereo IR for close-in obstacle avoidance, on the order of a foot or so, stereo SONAR for obstacle avoidance on the order of a few feet, and SONAR path finding out to about 8 feet.
The bumper handles collisions and up-close peripheral obstacles which the other sensors can't detect. When faced with collisions on both sides, it tries to center up on the detections, and after about 5 tries, it gives up and rotates 180 degrees to get free. I don't think it ever needs to do that in this video.

Video:
RCAT Free Navigating Indoors.
I've been playing with a CH Robotics IMU6 v2 (since discontinued, I think the newest version is IMU9).
The X and Y axes are quite stable but the Z axis on my unit drifts around too much to be directly usable for navigation and odometry.
However, the rate-of-change of the Z axis is pretty reliable, and it's being currently used on RCAT to augment the wheel-based odometry.
Here is an
RCAT Outdoors
test, looping back and forth between two waypoints 25 feet apart on my driveway.
There is a bit of drift observable in the course of the test, but all-in-all it works pretty well.

Video:
RCAT Waypoint Navigating Outdoors with IMU-Augmented Odometry.
-------------------------
(more to come!)
Here's a
link to my other robots.
last update: 18 Oct 2018
dpa